

Cách cấu hình mạch sẽ xác định mức độ chính xác của điện trở của cảm biến có thể được tính toán chính xác và mức độ đọc nhiệt độ có thể bị sai lệch bởi điện trở không liên quan trong mạch. Vì dây dẫn được sử dụng giữa phần tử điện trở và dụng cụ đo có điện trở, nên chúng ta cũng phải cung cấp phương tiện bù cho sự không chính xác này.
Vật liệu dây
Khi chỉ định vật liệu dây RTD , cần cẩn thận để chọn dây dẫn phù hợp với nhiệt độ và môi trường mà cảm biến sẽ tiếp xúc khi sử dụng. Khi lựa chọn dây dẫn, nhiệt độ là yếu tố quan trọng hàng đầu, tuy nhiên, các đặc tính vật lý như khả năng chống mài mòn và đặc tính chìm trong nước cũng có thể quan trọng. Ba công trình phổ biến nhất là:
- Đầu dò cách điện PVC cung cấp dải nhiệt độ từ -40 đến 105 ° C, với khả năng chống mài mòn tốt và có thể áp dụng cho việc ngâm trong nước.
- Đầu dò pt100 cách điện PFA cung cấp dải nhiệt độ từ -267 đến 260 ° C với khả năng chống mài mòn tuyệt vời. Chúng cũng rất tốt cho các ứng dụng Chìm trong nước.
- Mặc dù Đầu dò pt100 cách điện bằng sợi thủy tinh cung cấp dải nhiệt độ cao hơn từ -73 đến 482 ° C, nhưng hoạt động của nó dưới sự mài mòn hoặc ngâm nước được coi là không hiệu quả.
Vì dây dẫn được sử dụng giữa phần tử điện trở và dụng cụ đo có điện trở, nên chúng ta cũng phải cung cấp phương tiện bù cho sự không chính xác này.
Khả năng chống chuyển đổi nhiệt độ
RTD là một thiết bị tuyến tính hơn cặp nhiệt điện, nhưng nó vẫn yêu cầu phải phù hợp với đường cong. Phương trình Callendar-Van Dusen đã được sử dụng trong nhiều năm để tính gần đúng đường cong RTD:

Trong đó:
R T = Điện trở ở nhiệt độ T
R o = Điện trở ở T = 0ºC
α = Hệ số nhiệt độ ở T = 0ºC ((thường là + 0,00392Ω / Ω / ºC))
δ = 1,49 (giá trị điển hình cho 0,00392 bạch kim)
β = 0 T> 0 0. 11 (điển hình) T <0
Giá trị chính xác của các hệ số α, β và δ được xác định bằng cách thử nghiệm RTD ở bốn nhiệt độ và giải các phương trình kết quả. Phương trình quen thuộc này đã được thay thế vào năm 1968 bằng một đa thức bậc 20 để cung cấp một đường cong phù hợp chính xác hơn. Biểu đồ của phương trình này cho thấy RTD là một thiết bị tuyến tính hơn so với cặp nhiệt điện.
Cấu hình dây RTD
Có ba loại cấu hình dây, 2 dây, 3 dây và 4 dây, thường được sử dụng trong mạch cảm biến RTD. Cấu hình 2 dây với vòng bù cũng là một lựa chọn.
2 kết nối RTD
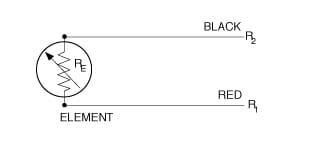 Cấu hình RTD 2 dây là đơn giản nhất trong số các thiết kế mạch RTD. Trong cấu hình nối tiếp này, một dây dẫn duy nhất kết nối mỗi đầu của phần tử RTD với thiết bị giám sát. Vì điện trở được tính toán cho mạch bao gồm điện trở trong dây dẫn và đầu nối cũng như điện trở trong phần tử RTD, nên kết quả sẽ luôn chứa một số sai số.
Cấu hình RTD 2 dây là đơn giản nhất trong số các thiết kế mạch RTD. Trong cấu hình nối tiếp này, một dây dẫn duy nhất kết nối mỗi đầu của phần tử RTD với thiết bị giám sát. Vì điện trở được tính toán cho mạch bao gồm điện trở trong dây dẫn và đầu nối cũng như điện trở trong phần tử RTD, nên kết quả sẽ luôn chứa một số sai số.
Vòng tròn thể hiện các ranh giới của phần tử điện trở đến điểm hiệu chuẩn. Cấu hình 3 hoặc 4 dây phải được mở rộng từ điểm hiệu chuẩn để tất cả các điện trở chưa hiệu chuẩn được bù.
Điện trở RE được lấy từ phần tử điện trở và là giá trị cung cấp cho chúng tôi phép đo nhiệt độ chính xác. Thật không may, khi chúng tôi thực hiện phép đo điện trở, thiết bị sẽ chỉ ra RTOTAL:
Trong đó
RT = R1 + R2 + RE
Điều này sẽ tạo ra kết quả đọc nhiệt độ cao hơn nhiệt độ thực tế đang được đo. Nhiều hệ thống có thể được hiệu chỉnh để loại bỏ điều này. Hầu hết các RTD kết hợp dây thứ ba với điện trở R3. Dây này sẽ được nối với một bên của phần tử điện trở cùng với dây dẫn 2.
Mặc dù việc sử dụng các đầu nối và đầu nối thử nghiệm chất lượng cao có thể giảm thiểu sai số này, nhưng không thể loại bỏ hoàn toàn. Cấu hình RTD 2 dây là hữu ích nhất với các cảm biến có điện trở cao hoặc trong các ứng dụng không đòi hỏi độ chính xác cao.
3 kết nối RTD
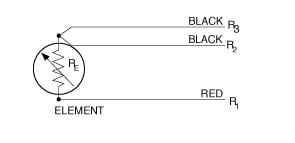 Cấu hình RTD 3 dây là thiết kế mạch RTD được sử dụng phổ biến nhất và có thể được nhìn thấy trong các ứng dụng giám sát và quy trình công nghiệp. Trong cấu hình này, hai dây liên kết phần tử cảm biến với thiết bị giám sát ở một bên của phần tử cảm biến và một dây liên kết nó ở phía bên kia của nó.
Cấu hình RTD 3 dây là thiết kế mạch RTD được sử dụng phổ biến nhất và có thể được nhìn thấy trong các ứng dụng giám sát và quy trình công nghiệp. Trong cấu hình này, hai dây liên kết phần tử cảm biến với thiết bị giám sát ở một bên của phần tử cảm biến và một dây liên kết nó ở phía bên kia của nó.
Nếu sử dụng ba dây dẫn giống nhau và chiều dài của chúng bằng nhau thì R1 = R2 = R3. Bằng cách đo điện trở qua dây dẫn 1, 2 và phần tử điện trở, người ta đo được tổng trở của hệ thống (R1 + R2 + RE).
Nếu cũng đo điện trở qua dây dẫn 2 và 3 (R2 + R3), chúng ta thu được điện trở của chỉ dây dẫn và vì tất cả các điện trở của dây dẫn đều bằng nhau, trừ giá trị này (R2 + R3) khỏi tổng điện trở của hệ thống ( R1 + R2 + RE) chỉ cho chúng ta RE và một phép đo nhiệt độ chính xác đã được thực hiện.
Bởi vì đây là kết quả trung bình, phép đo sẽ chỉ chính xác nếu cả ba dây kết nối có cùng điện trở.
Lỗi đo cầu 3 dây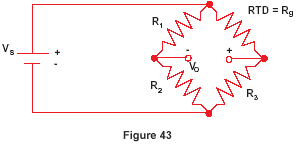
Nếu chúng ta biết V S và V O , chúng ta có thể tìm R g và sau đó giải ra nhiệt độ. Điện áp không cân bằng V O của một cây cầu có R 1 = R 2 là:
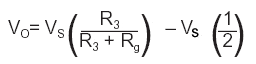 Nếu R g = R 3 thì V O = 0 và cầu cân bằng. Điều này có thể được thực hiện bằng tay, nhưng nếu chúng ta không muốn làm một sự cân bằng cầu sử dụng, chúng tôi chỉ có thể giải quyết cho R g về V O .
Nếu R g = R 3 thì V O = 0 và cầu cân bằng. Điều này có thể được thực hiện bằng tay, nhưng nếu chúng ta không muốn làm một sự cân bằng cầu sử dụng, chúng tôi chỉ có thể giải quyết cho R g về V O .
Biểu thức này giả định điện trở dây dẫn bằng không. Nếu R g được đặt cách cây cầu một khoảng nào đó trong cấu hình 3 dây thì điện trở dây dẫn RL sẽ xuất hiện mắc nối tiếp với cả R g và R 3 .
Một lần nữa chúng ta giải cho R g .
Thuật ngữ sai số sẽ nhỏ nếu V o nhỏ, tức là cầu gần cân bằng. Mạch này hoạt động tốt với các thiết bị như máy đo biến dạng, chỉ thay đổi giá trị điện trở vài phần trăm, nhưng RTD thay đổi điện trở đáng kể theo nhiệt độ. Giả sử điện trở RTD là 200 ohms và cầu được thiết kế cho 100 ohms:
Vì chúng ta không biết giá trị của R L , chúng ta phải sử dụng phương trình (a), vì vậy chúng ta nhận được:
Câu trả lời đúng tất nhiên là 200 ohms. Đó là một sai số nhiệt độ khoảng 2,5ºC.
Trừ khi bạn thực sự có thể đo điện trở của RL hoặc cân bằng cầu, kỹ thuật 3 dây cơ bản không phải là một phương pháp chính xác để đo nhiệt độ tuyệt đối với RTD. Một cách tiếp cận tốt hơn là sử dụng kỹ thuật 4 dây.
Kết nối 4 dây RTD
 Cấu hình này là phức tạp nhất và do đó tốn thời gian và tốn kém nhất để cài đặt, nhưng nó cho kết quả chính xác nhất.
Cấu hình này là phức tạp nhất và do đó tốn thời gian và tốn kém nhất để cài đặt, nhưng nó cho kết quả chính xác nhất.
Điện áp đầu ra của cầu là một chỉ báo gián tiếp của điện trở RTD. Cầu yêu cầu bốn dây kết nối, một nguồn bên ngoài và ba điện trở có hệ số nhiệt độ bằng không. Để tránh đặt ba điện trở hoàn thành cầu vào cùng nhiệt độ với cảm biến RTD, RTD được tách khỏi cầu bằng một cặp dây nối dài:
Các dây nối dài này tạo lại vấn đề mà chúng ta đã gặp phải lúc đầu: Trở kháng của dây nối dài ảnh hưởng đến đọc nhiệt độ. Hiệu ứng này có thể được giảm thiểu bằng cách sử dụng cấu hình cầu ba dây:
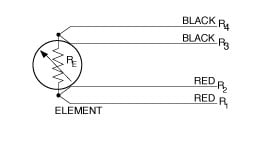
Trong cấu hình RTD 4 dây, hai dây liên kết phần tử cảm biến với thiết bị giám sát ở cả hai bên của phần tử cảm biến. Một bộ dây cung cấp dòng điện được sử dụng để đo và bộ còn lại đo điện áp rơi trên điện trở.
Với cấu hình 4 dây, thiết bị sẽ cho dòng điện không đổi (I) qua các dây dẫn bên ngoài, 1 và 4.
Cầu Wheatstone tạo ra mối quan hệ phi tuyến tính giữa sự thay đổi điện trở và sự thay đổi điện áp đầu ra của cầu. Điều này kết hợp đặc tính kháng nhiệt độ phi tuyến tính của RTD bằng cách yêu cầu một phương trình bổ sung để chuyển đổi điện áp đầu ra của cầu thành trở kháng RTD tương đương.
Điện áp rơi được đo trên các dây dẫn bên trong, 2 và 3. Vì vậy, từ V = IR, chúng ta tìm hiểu điện trở của riêng phần tử, không có ảnh hưởng từ điện trở của dây dẫn. Điều này mang lại lợi thế hơn so với cấu hình 3 dây chỉ khi sử dụng các dây dẫn khác nhau và điều này hiếm khi xảy ra.
Thiết kế cầu 4 dây này bù đắp hoàn toàn cho tất cả điện trở được tìm thấy trong các dây dẫn và đầu nối giữa chúng. Cấu hình RTD 4 dây chủ yếu được sử dụng trong phòng thí nghiệm và các cơ sở khác, nơi cần độ chính xác cao.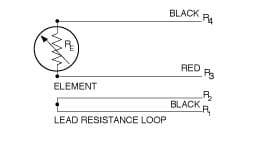
Cấu hình 2 dây với một vòng kín
Vẫn còn một cấu hình khác, hiếm gặp, là cấu hình 2 dây tiêu chuẩn với một vòng dây khép kín dọc theo (Hình 5). Chức năng này giống như cấu hình 3 dây, nhưng sử dụng thêm một dây để làm như vậy. Một cặp dây riêng biệt được cung cấp như một vòng lặp để bù cho điện trở dây dẫn và những thay đổi xung quanh trong điện trở dây dẫn.